日本精工株式会社(本社:東京都品川区、代表者:取締役 代表執行役社長 内山 俊弘、以下NSK)は、物体までの距離と位置を広範囲・高速で検出する近接覚センサを開発しました。
NSKは12月2日(水)から5日(土)に東京ビッグサイト(東京都江東区有明)で開催される「2015国際ロボット展」に本開発品を参考出展し、広く市場ニーズを探します。

Global
ASEAN and Oceania
Middle East
Africa
プレスリリース
2015年12月01日
日本精工株式会社 広報部
~ロボット、生産設備の安全性向上を提案~
日本精工株式会社(本社:東京都品川区、代表者:取締役 代表執行役社長 内山 俊弘、以下NSK)は、物体までの距離と位置を広範囲・高速で検出する近接覚センサを開発しました。
NSKは12月2日(水)から5日(土)に東京ビッグサイト(東京都江東区有明)で開催される「2015国際ロボット展」に本開発品を参考出展し、広く市場ニーズを探します。
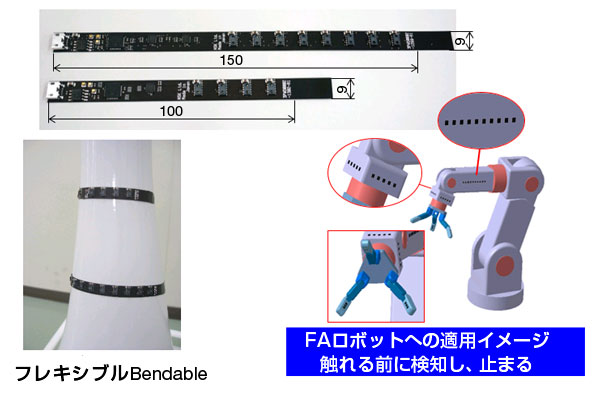
近年、人と協働可能な産業用ロボットが注目されています。日本においては、ロボットに係わる規制、労働安全衛生法が緩和され、生産ラインで人と並んで組立作業を行うなどの最大出力80W超の産業ロボットも条件を満たせば人との協調作業が可能になりました。これを受け、広範囲で死角が無く高速で検出可能なセンサが要求されています。本近接覚センサは、以下の優れた特長によって応答速度を従来比5倍以上*に上げました。この結果、ロボットが人に接近したことを確実に検出し、ロボットが人に触れる前に動作速度を下げる、止めることを可能にし、安全性向上への貢献が可能となります。
*:当社調べ。 従来用いられている一般的な画像/レーザセンサ
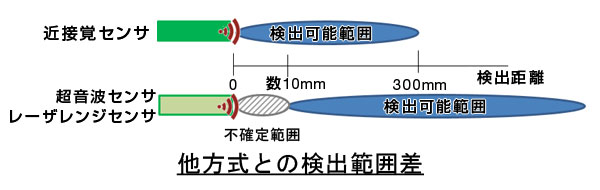
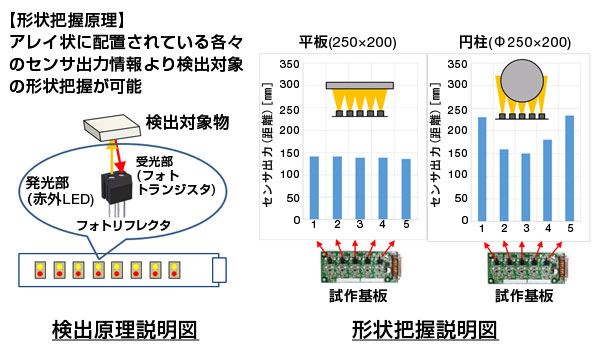
本開発品は、短冊形状のFPC基板(フレキシブルプリント基板)上に赤外線LEDセンサをアレイ状に配置し、物体までの距離と位置を広範囲・高速で検出します。また、フレキシブルに曲げられる基板を用い、各種形状のロボットアーム、生産ライン設備に容易に取り付けることが可能です。検出距離は0~300mmにおいて死角が無く、ロボットの動作速度制限や停止など状況に応じた制御が可能となります。